Magnus Effect Drone Flies, Looks Impossible
By now we’re all familiar with the quad-rotor design most popular among modern drones, and of course there are many variants using more or less propellers and even fixed-wing drones that can fly autonomously. We’ve even seen drones that convert from rotorcraft to fixed-wing mid flight. But there are even more esoteric drones out there that are far more experimental and use even more bizarre wing designs that look like they shouldn’t be able to fly at all. Take [Starsistor]’s latest design, which uses a single motor and an unconventional single off-center wing to generate lift.
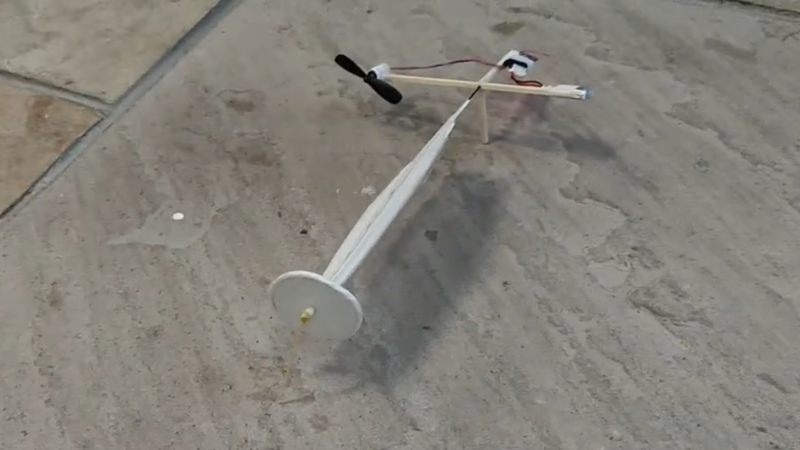
This wing, though, is not a traditional foil shape typically found on aircraft. It uses the Magnus effect to generate lift. Briefly, the Magnus effect is when lift is generated from a spinning object in a fluid. Unlike other Magnus effect designs which use a motor to spin a cylinder, this one uses a design inspired by Savonius wind turbines where a wing is free to rotate around a shaft. A single propeller provides a rotational force to the craft, allowing this off-center wing to begin spinning and generating lift. The small craft was able to sustain several flights but was limited due to its lack of active control.
[Starsistor] went through a number of iterations before finally getting this unusual craft to fly. His first designs did not have enough rotational inertia and would flip over at speed, which was fixed by moving the propeller further away from the center of the craft. Eventually he was able to get a working design to prove his conceptual aircraft, and we hope to see others from him in the future.